可以像鱼一样动态改变形状的水下结构比传统的刚性船体更有效地穿过水面。但是构建可以改变身体形状曲线同时保持光滑轮廓的可变形装置是一个漫长而困难的过程。
例如,麻省理工学院的RoboTuna由大约3,000个不同的部件组成,设计和建造耗时大约两年。
现在,麻省理工学院的研究人员和他们的同事——包括最初RoboTuna团队的一名成员——已经开发出一种创新的方法来建造可变形的水下机器人,使用简单的重复子结构而不是独特的组件。
该团队以两种不同的示例配置展示了新系统,一种像鳗鱼,另一种像翼状水翼。研究人员表示,该原则本身允许在形式和规模上几乎无限变化。
麻省理工学院研究助理AlfonsoParraRubio、MichaelTriantafyllou教授和NeilGershenfeld教授以及其他六位教授在一篇论文中报道了这项工作,该杂志发表在《软机器人》杂志上。
用于海洋应用的现有软体机器人方法通常是小规模制造的,而许多有用的现实世界应用需要米级设备。研究人员提出的新模块化系统可以很容易地扩展到这样的规模甚至更大,而不需要像扩大当前系统那样进行重组和重新设计。
“可扩展性是我们的强项,”ParraRubio说。考虑到构成系统的格子状部分(称为体素)的低密度和高刚度,他说,“我们有更多的空间来继续扩大规模,”而目前使用的大多数技术“依赖于高密度材料面对在转向更大尺寸的过程中存在严重问题”。
该团队的实验性概念验证设备中的各个体素大多是中空结构,由具有复杂形状的窄支柱的铸造塑料件组成。盒子状的形状在一个方向上承重,但在其他方向上柔软,这是一种通过以不同比例混合刚性和柔性组件而实现的不寻常组合。
“对待软机器人和硬机器人是一种错误的二分法,”ParraRubio说。“这是介于两者之间的东西,一种构建事物的新方法。”麻省理工学院比特和原子中心负责人Gershenfeld补充说,“这是结合了两者最佳元素的第三种方式。”
“身体表面的光滑柔韧性使我们能够实施流量控制,从而减少阻力并提高推进效率,从而节省大量燃料,”HenryL.andGraceDoherty海洋科学与工程教授Triantafyllou说,RoboTuna团队的一员。
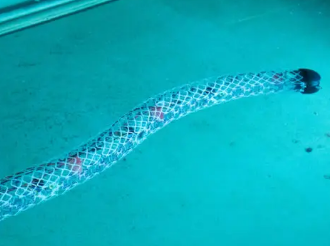
在该团队生产的其中一款设备中,体素首尾相连,排成一排,形成一米长的蛇形结构。身体由四个部分组成,每个部分由五个体素组成,中间有一个致动器,可以拉动连接到两侧两个体素中的每一个的电线,使它们收缩并导致结构弯曲。
20个单元的整个结构然后覆盖有肋状支撑结构,然后是紧密贴合的防水氯丁橡胶皮肤。研究人员将该结构部署在麻省理工学院的拖曳水箱中以展示其在水中的效率,并证明它确实能够产生足以通过起伏运动推动自身前进的前向推力。
“以前有很多蛇形机器人,”Gershenfeld说。“但它们通常由定制组件组成,而不是这些可扩展的简单构建块。”
例如,ParraRubio说,NASA制造的蛇形机器人由数千个独特的部件组成,而对于这组蛇,“我们展示了大约60个部件。”他说,与设计和建造麻省理工学院RoboTuna所花费的两年时间相比,该设备的组装时间大约为两天。
他们展示的另一种装置是一种类似机翼的形状或水翼,由一组相同的体素组成,但能够改变其轮廓形状,从而控制机翼的升阻比和其他特性。这种类似机翼的形状可用于多种用途,从利用波浪发电到帮助提高船体效率——这是一项紧迫的需求,因为航运是碳排放的重要来源。
与蛇不同的是,机翼的形状覆盖着一系列鳞片状的重叠瓷砖,即使机翼改变曲率,它们也会相互压紧以保持防水密封。
一种可能的应用可能是对船体轮廓进行某种添加,可以减少阻力涡流的形成,从而提高其整体效率,该团队正在与航运业的合作者探索这种可能性。
OldendorffCarriers全球参与和可持续发展董事总经理ScottBergeron表示,“一系列创新技术,例如麻省理工学院团队对细胞系统中流体动力学变形可行性的演示,代表了对传统设计的有希望的改变,可以帮助我们满足联合国授权减少航运碳足迹的挑战。”
最终,这一概念可能会应用于类似鲸鱼的潜水艇,利用其可变形的身体形状来产生推进力。这种工艺可以通过停留在水面以下来避开恶劣天气,但没有传统推进的噪音和湍流。
这个概念也可以应用于其他船只的部分,例如赛艇,在这些船只上,有一个龙骨或方向舵可以在转弯时轻轻弯曲而不是保持笔直可以提供额外的优势。Gershenfeld说:“如果你真的能像鱼一样弯曲,而不是僵硬或只是有一个襟翼,你就可以更有效地绕过转弯。”