动作捕捉(mocap)系统是一种可以检测和记录人类、动物和物体运动的技术,广泛应用于各种环境中。例如,它们已被用于拍摄电影、在交互式视频游戏控制台中创建具有逼真的嘴唇和身体运动的动画,甚至用于控制机器人。
俄罗斯斯科尔科沃科学技术研究所(Skoltech)的研究人员最近开发了一种新的动作捕捉系统,可以实现更安全、更有效的人机交互。该系统在arXiv上预先发表的一篇论文中介绍,基于可穿戴机器人系统和相机来跟踪用户手臂的运动。
该项目的主要研究员AliAlabbas告诉TechXplore:“这项工作是智能空间机器人(ISR)实验室在人机交互领域多年研究的成果。”“人机交互涉及人类和机器人共同参与的协作任务,因此人类操作员的安全是此类应用中的重中之重。这项工作是建立在我们实验室之前开发的经验和技术的基础上的。”
该研究团队推出的动作捕捉系统从他们之前开发的两项技术中汲取了灵感。第一个是名为CobotGear的系统,它使用6-DoF可穿戴摄像头来跟踪人类手臂运动。第二个是CoHaptics,利用触觉(与触摸相关的)反馈,向用户提供有关他们与机器人的距离的信息,并在机器人非常接近他们时向他们发出警报。
“我们工作的一个目标是开发一种低成本且易于安装的动作捕捉系统,该系统可以在工作环境中检测和定位用户的手,并采用支持CobotGear功能的算法来避免机器人和用户之间的碰撞因为他们正在从事协作任务,”阿拉巴斯解释道。“所提出的动作捕捉系统是基于视觉的。它使用相机和计算机视觉来定位附着在用户手上的独特视觉机器人标记(我们动作捕捉系统的目标)。”
在梅赛德斯概念车AVTR中应用机器人产生集中太阳能或仿生襟翼进行空气动力调节。
动作捕捉系统的一个常见限制是它们可能会受到遮挡的不利影响。换句话说,如果系统跟踪的视觉标记部分或完全隐藏在物体后面,系统将无法再跟踪它。阿拉巴斯和他的同事着手通过降低遮挡风险来解决这一限制。
“我们的想法是开发一种可以移动标记的机制,确保它始终对动作捕捉系统可见,”阿拉巴斯说。“我们的解决方案是建造一个小型可穿戴机器人,它可以固定标记并具有旋转能力。”
该研究团队创建的系统基于用户应佩戴在前臂上的机器人。该机器人以不同的方式移动标记,确保它始终保持在集成摄像头的视野内。
DzmitryTsetserukou教授说:“通常,动作捕捉的逆反射标记具有球形形状,因为如果从不同角度由摄像机捕获,大小将相同。”“另一方面,你需要在人体上放置许多标记,并安装昂贵的红外摄像机来消除除球体之外的所有可见物体,因此动捕系统可能要花费数十万美元。我们提出了ArUcoGlide,这是一种经济实惠的产品强大的解决方案,可以使用低成本的单摄像头跟踪人体运动,甚至可以通过触觉提示与用户运动进行对话。”
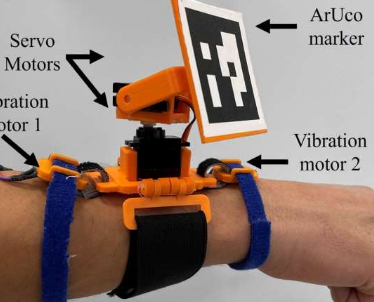
ArUcoGlide机器人非常轻,重量不超过一块简单的手表。这意味着用户可以轻松佩戴它,而不会引起他们的不适。机器人系统拥有一个由摄像头定位的独特标记,提供有价值的反馈,旨在防止人机交互期间发生碰撞。
可穿戴动作捕捉机器人ArUcoGlide。
“该系统由三部分组成:可穿戴机器人标记、跟踪系统和防撞控制器,”阿拉巴斯说。“我们将这款可穿戴机器人命名为ArUcoGlide,它拥有一个独特的视觉标记,并调整该标记的方向,以确保其对摄像头的可见性,并解决环境中物体遮挡的问题。该机器人还可以通过振动的形式提供触觉反馈。“如果发生危险情况。我们建议保持相机和标记之间的固定方向,可以减少由于用户移动而导致标记不显示的情况。”
该团队的动作捕捉解决方案的第二个组件是跟踪系统,由摄像机和基础计算机组成。摄像机捕捉人类与机器人协作的环境的实时流。然后,基础计算机处理该流以提取环境中标记的坐标。
“第三个组件是防撞控制器,最初是作为我们之前开发的CobotGear系统的一部分引入的,”Alabbas说。“该控制器控制机器人的运动,以避免在工作空间中与用户的手发生潜在的碰撞。”
本质上,团队系统的工作原理如下。摄像机记录人类和机器人协作的环境。AucoGlide机器人调整用于跟踪运动的标记的方向,确保其始终保持在摄像机的视野内。最后,碰撞控制器移动机器人以防止其与用户接触。
“简而言之,标记器与2-DoF机器人一起在太空中滑行,以连续捕获身体运动,”Tsetserukou解释道。“如果标记是静态的,即它不调整空间位置,则跟踪系统将在相对于摄像机的非常陡或浅的角度处丢失它。当人类的安全是首要任务时,它不适用”。
使用ArUcoGlide系统进行真实实验。机器人拿起一个空移液器,从容器中填充液体,然后将其返回。用户计数试管中的液滴。图片来源:Alabbas等人。
研究人员通过一系列实验对ArUcoGlide进行了评估,测试其跟踪系统的准确性、该系统在即将发生碰撞之前如何影响人类和机器人的行为以及其在现实世界协作任务中的表现。他们发现,它显着提高了机器人与人类交互的安全性,将用户的手与机器人之间的距离保持在平均5厘米。
该系统可以有效地增强各种现实环境中的人机协作。例如,它可以帮助医务人员吸取血液样本。
Tsetserukou说:“当人的手臂靠近机器人时,我们的系统可以检测到它并激活防撞算法,这样机器人就不会伤害用户。”广泛的运动范围。重要的是,具有移动ArUco标记和触觉反馈的系统可将共享医疗测试过程加快16%。”
值得注意的是,该团队的动作捕捉系统还可以进行调整以满足特定应用的需求。例如,如果用户希望更改正在监控的环境,他们只需将其运动跟踪摄像头移动到所需位置并重新启动系统即可。
阿拉巴斯说:“该系统设计用于共享工作环境,让人想起仓库或实验室中的典型活动。”阿拉巴斯说:“例如,它可以安装在实验室中,在那里,机械臂可以与化学家一起准备一些解决方案,加快过程并保护用户免受有毒物质的影响。”
“化学家的注意力肯定集中在材料上,因此我们的系统通过监控工作环境,始终可以定位化学家的手,并尽量避免机器人与其发生碰撞。ArUcoGlide非常适合,因为它具有成本效益和易用性安装过程中,用户只需将摄像头固定在合适的位置,检测工作环境,佩戴ArUcoGlide,即可开始工作。”
图片来源:Alabbas等人。
ArUcoGlide很快就会在更广泛的场景中实施和测试,以验证其改善人机交互的潜力。在他们的下一个作品中,Alabbas、Tserserukou和他们的同事希望进一步开发它,以跟踪用户的整个身体。
“我们计划开发GlideSuit,这是一种将机器人标记放置在整个身体上的系统:手臂、手、腿和躯干。”Tsetserukou说。“ArUco标记将在人体上同步移动,以与相机光轴保持正常。”
ArUcoGlide的更新版本可用于使用单个摄像头实时跟踪用户的骨骼。此外,它还可以支持增强现实(AR)应用,例如允许用户可视化人体内部的器官或肌肉,或者查看不同的衣服穿在他们身上的效果。
“想象一下实时拍摄一个移动的人抱着虚拟3D鸟的视频,”Tsetserukou说。“ArUcoGlide不仅可用于人类,也可用于机器人。放置在无人机顶部,只需在天花板上安装一个摄像头,我们就可以跟踪一群机器人并控制它们的编队进行灯光表演。另一个有趣的应用是舞蹈当我们通过触觉反馈引导人类在3D环境中获得理想的肢体轨迹时,可以进行教学和康复。”