如果您正在寻找一个新项目让您在接下来的几个周末保持忙碌,您可能会对这个由ArduinoMega2560开发板提供支持的六足机器人项目感兴趣。查看下面的视频,详细了解AecertRoboticsYouTube频道主持人如何在三个月内从头开始构建六足机器人。
Ardunio官方博客写道:
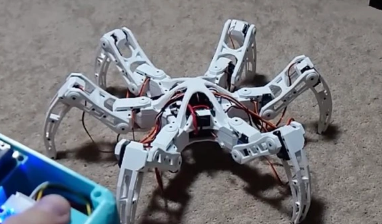
“正如你在详细视频中看到的那样,这个机器人非常敏捷。如果你仔细观察,你会发现每一步都是三条腿抬起,三条腿与地面保持接触。这使机器人非常稳定,因为它可以很容易地在三脚接触地面形成的三脚架上保持平衡。每条腿都有三个关节:水平旋转腿的“髋”关节、垂直旋转的“膝”关节和垂直旋转的“踝”关节。伺服电机直接驱动所有这些关节,这意味着总共有18个伺服系统。”
“虽然机器人可以用两条腿(甚至一条腿)四处走动,但很难获得平稳高效的步态。最多移动四条腿可以稍微改善这种情况,但是每条腿仍然需要多个关节和仔细的平衡才能让机器人以稳定的方式移动。一旦将腿数增加到六条,就可以实现一些非常好的步态,这就是六足机器人如此受欢迎的原因。为了试验六足机器人,AecertRobotics从头开始构建了这款灵活的DIY六足机器人。”
“在过去的3个月里,我从零开始设计、构建和编程了一个由Arduino驱动的六足机器人,这个视频将带您完成这段旅程!作为我8年来的第一个机器人项目,我认为结果非常好